


摘要:基于FIFO芯片AL422B,以飛思卡爾16位單片機MC9S12DG128為核心,采集攝像頭芯片OV7670的圖像信息,設計出以低速率的單片機采集高速率圖像的圖像采集系統。系統采用單片機控制FIFO芯片,先由FIFO實時讀取攝像頭芯片的一幅完整圖像信息,再由單片機以低速率從FIFO的相應寄存器讀取該幅圖像,讀取的同時進行相應的圖像處理,得出所需圖像中點光源的像素距離后通過FIFO進行下一幅圖像的采集。本方案通過樣機實驗,完全能滿足要求,確保了一副圖像的完整性。
關鍵詞:點光源標桿;圖像;FIFO;單片機
引言
在單片機應用系統中,由于圖像采一體電感集速度、程序存儲器和數據存儲器的尋址空間的限制,要完整存儲30 fps、640×480像素大小的一幅圖像是相當困難的。本文運用較高性能的16位飛思卡爾單片機在超高頻的情況下直接采集圖像,也只能采集到每行320個像素,丟失圖像,無法獲得一幅完整的圖像。大電流電感本文通過在圖像采集過程中增加FIFO芯片AL422B較好地解決了這一問題,相對于采用昂貴的DSP而言,降低了圖像采集系統的成本。
1 單目點光源測距原理
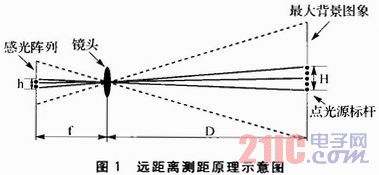
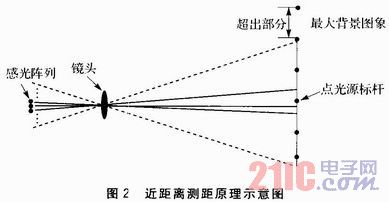
野外作業時,需要在運動中知道前方標桿和觀察點之間的距離。本文將標桿制成等間距紅外點光源標桿,滿足了基于單幀靜態圖像的小孔成像原理測距模型要求,減少了圖像處理量,提高了測量的實時性、全天候性。H為各點光源標桿的實際距離;n為點光源個數,它可以通過圖像處理獲得;f為攝像頭焦距;標尺實際像素物理距離h由攝像頭標定取得。遠距離測距原理示意圖如圖1所示,整條點光源標桿都在攝像頭視野范圍內。近距離測距原理示意圖如圖2所示,點光源標桿只有部分在攝像頭范圍內。通過圖1,可求出前方標桿與觀察點的距離D。攝像機的成像幾何關系也可用小孔成像原理來近似表示:
![]()
2 圖像采集系統硬件設計
根據單目視覺測距的要求,需要通過一黑白攝像頭實時采集前車的點光源標桿,通過標尺上點光源所在的像素距離推算出前車距離。為了能完整地讀取圖像,本文增加了FIFO芯片,圖像采集原理示意圖如圖3所示。由單片機監測攝像頭的行/場信號,控制FIFO讀取相應的圖像;讀完所有行后,關閉FIFO讀取圖像功能,開始由單片機從FIFO中讀取圖像數據,并進行相應的圖像處理,根據圖像處理的復雜程度,決繞行電感器定圖像處理和圖像采集的時間比。由于FIFO是先入先出,其讀取數據時單片機只需通過中斷使能行/場信號,絕大部分時間單片機可以用來進行圖像處理。本文采取的是采集一幀圖像后,單片機利用兩幀圖像的空閑時間和下一幀FIFO采集時間,共約3幀時間進行圖像處理和控制,其結果是圖像由原來的30 fps,變成10fps。盡管幀率慢了,但經過分析得知,在100 km/h情況下,滯后距離2.8 m,可以滿足要求。

2.1 飛思卡爾16位單片機MC9S12DG128
本文采用飛思卡爾1 6位單片機MC9S12DG128作為主控芯片,該芯片是Freescale公司推出的S12系列微控制器中的一款增強型、汽車級的16位微控制器,片內總線時鐘頻率最高可達25 MHz,集成了8 KB的RAM、128KB的Flash、2 KB的EEPROM,集成度高,資源也相當豐富。
2.2 攝像頭芯片OV7670
OV7670是OmniVision公司推出的Camerachiptm圖像傳感器,體積小,工作電壓低。VGA圖像最高達到30fps。其主要特性為:
◆感光陣列(大電流電感共有656×488個像素,在YUV的模式中有效像素環形電感為640×480個);
◆高靈敏度適合低照度應用,對紅外光線敏感;
◆標準的SCCB接口,兼容I2C總線接口;
◆RawRGB、RGB(GRB4:2:2,RGB565/555/444)、YUV(4:2:2)和YCbCr(4:2:2)輸出格式;
◆支持VGA、CIF和從CIF到40×30的各種尺寸。
2.3 FIFO芯片AL422B
AL422B是AverLogic公司推出的一個存儲容量為393 216字節×8位的FIFO存儲芯片。其所有的尋址、刷新等操作都由集成在芯片內部的控制系統完成,AL422B內部功能結構框圖如圖4所示。 大功率電感廠家 |大電流電感工廠
