


1 基本原理
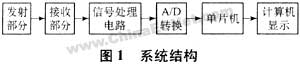
光電定向是指用光電系統(tǒng)測定目標的方向,這是光學雷達和光學制導的重要組成部分[1],利用光電系統(tǒng)可以直接、間接測定目標的方向,該系統(tǒng)主要由發(fā)射部分、光電探測器,信號處理電路,A/D轉(zhuǎn)換器和單片機、計算機顯示器組成,結(jié)構(gòu)框圖如圖1所示。
2 具體實現(xiàn)
2.1 發(fā)射部分
光發(fā)射電路主要由光源驅(qū)動器、光源(主要是半導體光源,包括LED(發(fā)光二極管),LD(激光二極管)等)、光功率自動控制電路等部分組成,我們用NE555組成的脈沖發(fā)射電路來驅(qū)動650nm的激光器,為了使半導體激光器克服供電電源波動、器件老化等因素的影響,確保激光器輸出功率穩(wěn)定,還必須有自動功率大電流電感器控制電路。
2.2 接扁平型電感收部分
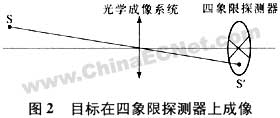
接收部分主要由四象限光電探測器組成,四象限光電探測器是把4個性能完全相同的光電二極管按照直角坐標要求排列而成的光電探測器件,目標光信號經(jīng)光學系統(tǒng)后在四象限光電探測器上成像,如圖2所示[2],一般將四象限光電探測器置于光學系統(tǒng)焦平面上或稍離開焦平面,當目標成像不在光軸上時,4個象限上探測器輸出的光電信號幅度不相同,比較4個光電信號的幅度大小可以知道目標成像在哪個象限上(也就知道了目標的方位)。
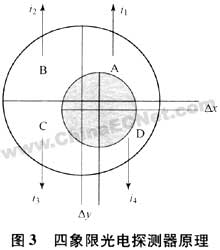
四象限光電探測器是通過測量來自激光束的電感器生產(chǎn)光斑質(zhì)心的位置變化,并借助某種算法來同時確定光斑的兩個方向的偏移量,如圖3所示[3],光斑被四個象限分成A、B、C、D等4個部分,其面積分別為s1、s2、s3、s4,對因的4個象限產(chǎn)生的阻抗電流分別為i1、i2、i3、i4。由i1+i4和i2+i3的比例可以確定橫向偏移量,i1+i2和i3+i4的比例可以確定縱向偏移量。
采用的算法是:
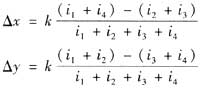
式中:k比例系數(shù),是一常量。
當光斑中心與四象限光電探測器中心一致時,4個象限陰極產(chǎn)生的阻抗電流i1、i2、i3、i4都相等,兩個方向的直線度誤差為0,當兩者中心步重合時,兩個方向的偏移量可以由上式求出。
2.3 信號處理電路
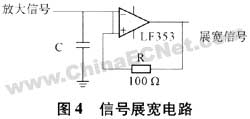
四象限光電探測器將接收的4路光信號轉(zhuǎn)變成電信號,經(jīng)過放大后送入信號處理部分,單脈沖定向系統(tǒng)中,光脈沖通常由激光產(chǎn)生,其脈沖寬度一般為幾十納秒量級,也許更窄。而重復頻率比較低,一般為幾十赫,這種信號要用來指示或控制,需要經(jīng)過放大與展寬。由于4路相同,4路信號采用完全相同的電路,首先通過放大器對各路信號進行放大,放大后的信號送入展寬電路(見圖4)進行展寬,展寬實質(zhì)上是峰值保持的一個特例,由于脈共模電感器沖寬度極窄要求電路響應快,又要保持響度較長的時間,而且還需要有較高的線性輸出,所以展寬電路實質(zhì)上是用于將目標脈沖信號在顯示時有一個持續(xù)時間,以便觀察。
2.4 A/D轉(zhuǎn)換和單片機部分
實現(xiàn)模擬信號的數(shù)字顯示必須對模擬信號進行A/D轉(zhuǎn)換,A/D轉(zhuǎn)換時需要考慮轉(zhuǎn)換的精度和速度,A/D轉(zhuǎn)換器的轉(zhuǎn)換位數(shù)決定了轉(zhuǎn)換電感器生產(chǎn)廠家的精度,時鐘頻率決定了轉(zhuǎn)換的速度,通過A/D轉(zhuǎn)換后的信號再送入單片機[4],然后通過RS-232連接線與計算機相連,在計算機上顯示數(shù)字輸出。
在光電定向?qū)嶒瀮x中,單片機的任務是:4路信號的數(shù)據(jù)采集,與上位機的串口通信,驅(qū)動步進電機,通過單片機產(chǎn)生脈沖信號。
單片機的整體程序框圖如圖5所示。
