


摘要:為了保障海洋探測設備的順利回收,盡可能減少人員或財產的損失電感器生產廠家,利用GPS和GSM網絡模塊以及防水電磁鐵等相關器件,設計了一種智能且通用的水下自救釋放系統。旨在水下設備遇到危險時,自救釋放器釋放自救浮標,用于告警和定位水下設備,使其安全回收,也可用于水下工作人員或其他水下目標的水面定位。
關鍵詞:自救釋放器;自救浮標;GPS;GSM/GPRS;AUV
0 引言
用于水下探測的設備品種繁多且價格昂貴,在海上實驗時如何保障這些設備的順利回收,盡可能減少損失,成為人們關注的焦點之一。目前的常用方法是為水下設備定制一套自救系統以保證其安全,但是這種方法一方面增加了設備的成本和研發周期,另一方面是其自救部分不具有通用性,應用范圍受到很大限制。甚至許多水下探測設備沒有自救裝置,主要是依靠工作人員的保障措施,如固定設備或加系纜繩等。
本文旨在設計一種高可靠性,低成本且通用的水下自救釋放器及與其配套的自救浮標,可以用于定位水下設備,保障其安全回收。
1 系統總體方案
該系功率電感統的外形結構設計如圖1所示。其結構主要包括自救浮標、釋放機構和控制艙3部分。自一體電感器救浮標在備出現危險時被釋放以通知岸上人員回收設備,釋放機構主要負責自救浮標的釋放,而控制艙則是采集設備數據進行決策控制的核心。
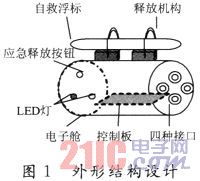
自救浮標中裝有GPS模塊、GSM/GPRS模塊;釋放機構主要部件是防水電磁鐵,并以機械儲能的方式釋放浮標;控制艙內主要是以sPIC30F 4011單片機為處理核心的控制板,完成浮標釋放命令的執行、參數配置命令的處理以及外部設備電源電壓、工作溫度、深度的采集等任務。艙內還有電源管理模塊以實現電壓轉換和蓄電池的充放電管理等。
該系統體系結構如圖2所示。
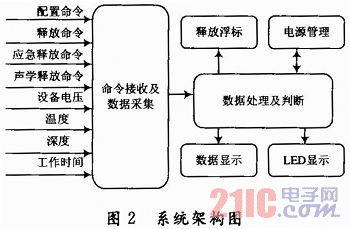
命令接收及數據采集模塊主要負責接收外部命令和采集外部扁平型電感設備的工作參數。數據處理及判斷模塊是數據處理的核心,它根據命令接收及數據采集模塊傳來的數據進行判斷,進而采取相應的措施,如通過顯示屏顯示數據,用LED顯示外部設備的工作狀態和釋放自救浮標等。電源管理模塊為控制艙電路板提供穩定的電源、管理蓄電池的充放電。
2 控制艙設計
控制艙核心處理器采用dsPIC30F4011單片機并嵌入實時操作系統μC/OS-Ⅱ,用來完成參數采集、通信、數據判斷以及釋放浮標等任務的執行與調度。控制艙外部有4種接口:串口接口、A/D輸入接口、充電接口、聲學釋放命令擴展接口以及應急釋放按鈕(見圖1)。在使用時,需先通過串口以一定協議格式對釋放器監測參數進行配置(如設定傳感器數據危險上限值等),此時需要上位機軟件,其中上位機與單片機以串口的形式進行通信。出現危險時可通過串口向釋放器發送釋放浮標指令或釋放器自身通過A/D輸入接口監測設備工作狀態進而判斷釋放浮標。聲學釋放命令擴展接口用于接收岸上人員發送的聲學釋放浮標命令,該接口為擴展接口。應急釋放按鈕用于水下作業人員通過按鈕釋放浮標。此外艙外還有LED燈,用于顯示數據和外部設備的工作狀態。艙內配有LCD顯示屏,供開發調試使用。
在數據參數閾值判斷方面,由于水下探測設備一般都會自帶有溫濕度傳感器等裝置,水下探測設備控制中心只需要通過串口將自身的各種特征值(如溫度、濕度、深度、設備電壓電流等)傳給自救系統控制即可。之后,控制艙將實時監測這些數據的變化,一旦某一項數據超過危險值上限,控制艙驅動釋放器釋放自救浮標,從而通知岸上人員對設備進行及時回收。
3 釋放器設計
自救浮標釋放機構主要采用防水電磁鐵來實現,而該電磁鐵的吸合與釋放工型電感器主要通過繼電器來驅動。程序設定為當控制艙單片機的I/O引腳輸出為低電平時,繼電器打開,電磁鐵上電。自救浮標就會從釋放機構脫落并且上浮,從而實現對外報警和自救的功能,如圖3所示。

