


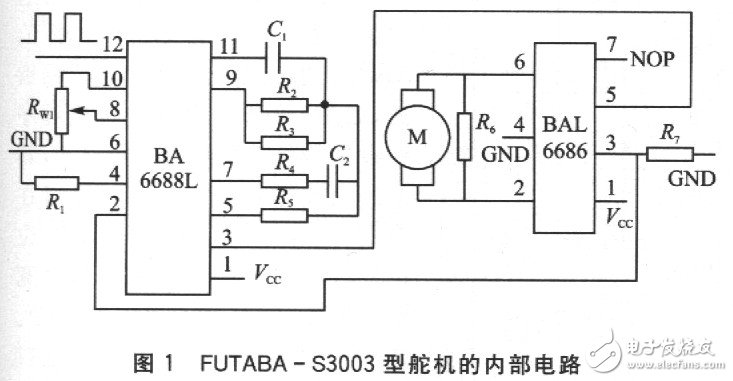
舵機是一種位置伺服的驅動器。它接收一定的控制信號,輸出一定的角度,適用于那些需要角度不斷變化并可以保持的控制系統。在微機電系統和航模中,它是一個基本的輸出執行機構。以FUTABA-S3003型舵機為例,圖1是FUFABA-S3003型舵機的內部電路。
舵機的工作原理是:PWM信號由接收通道進入信號解調電路BA66881。的12腳進行解調,獲得一個直流偏置電壓。該直流偏置電壓與電位器的電壓比較,獲得電壓差由BA6688的3腳輸出。該輸出送人電機驅動集成電路BA6686,以驅動電機正反轉。當電機轉速一定時,通過級聯減速齒輪帶動電位器R。,旋轉,直到電壓差為O,電機停止轉動。舵機的控制信號是PWM信號,利用占空比的變化改變舵機的位置。
舵機的控制方法
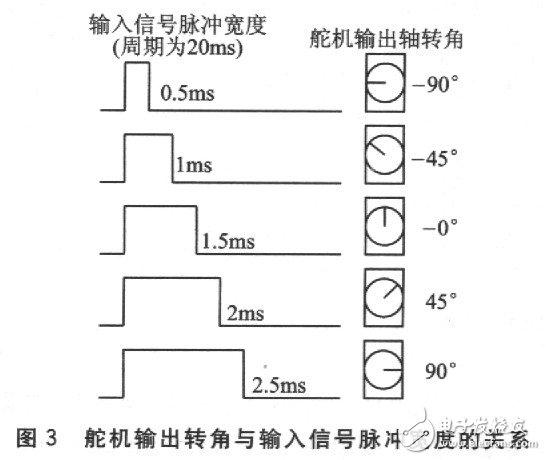
電源線和地線用于提供舵機內部的直流電機和控制線路所需的能源.電壓通常介于4~6V,一般取5V。注意,給舵機供電電源應能提供足夠的功率。控制線的輸入是一個寬度可調的周期性方波脈沖信號,方波脈沖信號的周期為20 ms(即頻率為50 Hz)。當方波的脈沖寬度改變時,舵機轉軸的角度發生改變,角度變化與脈沖寬度的變化成正比。某型舵機的輸出軸轉角與輸入信號的脈沖寬度之間的關系可用圍 3來表示。
舵機控制器硬件電路設計
從上述舵機轉角的控制方法可看出,舵機的控制信號實質是一個可嗣寬度的方波信號(PWM)。該方波信號可由FPGA、模擬電路或單片機來產生。采用FPGA成本較高,用模擬電路來實現則電路較復雜,不適合作多路輸出。一般采用單片機作舵機的控制器。目前采用單片機做舵機控制器的方案比較多,可以利用單片機的定時器中斷實現PWM。該方案將20ms的周期信號分為兩次定時中斷來完成:一次定時實現高電平定時Th;一次定時實現低電平定時T1。Th、T1的時間值隨脈沖寬度的變換而變化,但,Th+T1=20ms。該方法的優點是,PWM信號完全由單片機內部定時器的中斷來實現,不需要添加外圍硬件。缺點是一個周期中的PWM信號要分兩次中斷來完成,兩次中斷的定時值計算較麻煩;為了滿足20ms的周期,單片機晶振的頻率要降低;不能實現多路輸出。也可以采用單片機+8253計數器的實現方案。該方案由單片機產生計數脈沖(或外部電路產生計數脈沖)提供給8253進行計數,由單片機給出8253的計數比較值來改變輸出脈寬。該方案的優點是可以實現多路輸出,軟件設計較簡單;缺點是要添加l片8253計數器,增加了硬件成本。本文在綜合上述兩個單片機舵機控制方案基礎上,提出了一個新的設計方案,如圖4所示。 大功率電感廠家 |大電流電感工廠
