


0 引言
航標是航行標志的簡稱,是指示航道方向、界限與礙航物的標志,為船舶的安全航行提供了基本保障。航標終端通過測量航標燈工作狀態(電壓、電流、可用燈泡數、閃光周期、位置信息等參數),再將這些狀態信息以數據報的形式在CPU的控制下通過公共通訊網發送回航標監控中心。同時,監控中心也可以對航標進行遠程遙控。這樣,就能使得當代的航道建設趨于數字化、信息化。
1.系統總體設計
航標終端需要測量和控制的對象參數主要有電壓、電流、燈質、日光值等,既有模擬量又有數字量。終端必須是一個電源適應能力強、抗干擾能力強、功耗低、集成模數轉換的SOC(System On Chip)系統。本航標終端采用主、從雙CPU結構。系統主控制器采用NXP(恩智浦)公司的32位Cortex-M3內核嵌入式微處理器 LPC1769,負責與監控中心的GPRS/GSM通信、GPS信號的讀取與前差分處理、本地數據的存儲、RS-232/485擴展通信、模擬量檢測、與從CPU通信及系統遠程升級等工作,并預留其他通信接口;從CPU采用NXP公司的32位Cortex-M0內核嵌入式微處理器LPC1114,負責燈質、傾角/撞擊和環境溫度等參數的檢測并預留其他通信接口。基于ARM的航標終端系統框架如圖1示。
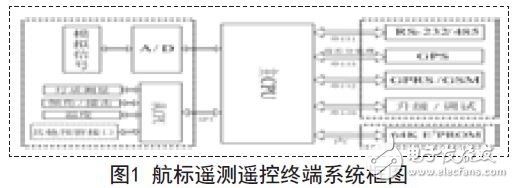
圖1中,A/D用于檢測電壓和電流;從CPU負責燈質、傾角/撞擊、溫度的測量及預留接口;64K E2PROM保存配置數據、歷史數據等;串口0用于在系統升級和調試,串口2用于GPRS/GSM模塊通訊,串口3用于GPS數據的通訊,串口1用于提供一個RS-232/485接口,和其他外設通訊。 大功率電感廠家 |大電流電感工廠
