


前言
磁流變液是一種阻尼可控的智能材料,它由微米級的磁性顆粒與絕緣載液、穩定劑混合而成。在無磁場作用下其流變特性為牛頓流動,而在外加磁場的作用下, 磁流變液在毫秒級的時間內可以實現從液態到固態的可逆轉換。當外加磁場撤去時,磁流變體又恢復到原來的液體狀態,其響應時間僅為幾毫秒,易于控制并且連續可控, 利用流變特性這一特性制作的磁流變減振器是一種典型的非線性系統,具有高度的非線性、時滯性和不確定性,非線性特性是其影響工作的重要因素。在磁流變減振控制系統中,采用傳統的控制方法對磁流變阻尼器進行控制,控制效果有時難以滿足要求,模糊控制不需要精確的數學建模,大量文獻和工程應用表明,模糊控制具有很強的魯棒性,能夠較好的應用于磁流變減振控制系統。
本文設計一種基于DSP的磁共模電感流變減振模糊控制系統,以TMS320LF2407為控制系統核心,采用模糊控制策略,較好的實現了系統的減振控制,且系統結構簡單、實現方便,適用性強。
1 系統設計方案
1.1 系統主控芯片TMS320LF2407
TMS320LF2407 芯片是美國德州儀器公司開發的 DSP 控制器 24x 系列的成員之一,是TMS320C2000 平臺下的一種定點 DSP 芯片,具備以下特點:
(1)采用高性能靜態 CMOS 技術,供電電壓僅為 3.3V,功耗低;30MIPS的執行速度使得指令周期縮短到 33ns(30MHz),實時控制能力強。
(2)片內有高達32K的 FLASH 程序存儲器,高達 1.5K 字的數據/程序 RAM,544 字雙口RAM(DARAM)和 2K 字的單口 RAM。
(3)兩個事件管理器模塊 EVA 和 EVB,每個包括:兩個 16 位通用定時器;8電感生產廠家 個 16 位的脈寬調制(PWM)通道。10 位 A/D 轉換器,最小轉換時間為 500ns,可選擇由EVA或EVB來觸發的兩個8 通道輸入 A/D 功率電感器轉換器或一個 16 通道輸入的 A/D 轉換器。
(4)可擴展的外部存儲器總共 192 字空間;64K 字程序存儲器;64K 字 I/O 尋址空間。
(5)高達 40 個可單獨編程或復用的通用輸入/輸出引腳(GPIO)。
(6)5 個外部中斷,電源管理包括3 種低功耗模式,并且能獨立將外設器件轉入低功耗模式,16位串行外設接口模塊。
利用芯片的片內外設及其優點,以此芯片作為系統控制器的核心。
1.2 模糊控制技術
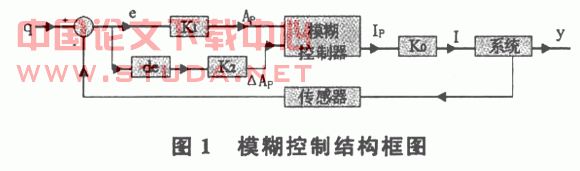
模糊控制特別適用于存在參數時變、非線性、強耦合系統,這類系統的精確數學模型的建立困難很大,甚至于無法建模。模糊控制是通過模糊控制器來實現的,模糊控制器是對人腦所具有的模糊推理機能的模擬。它是應用模糊數學的知識,模擬人的思維方法,把人類自然語言描述的控制策略改造成模糊控制規則,依據規則確定控制量。模糊控制基于模糊控制規則、經推理后控制被控對象,魯棒性強。模糊推理控制在智能結構振動控制中已有較多的應用。本文采用模糊推理策略,設計了相應的模糊控制器,實現控制電流的輸出控制。模糊控制結構框圖如圖1所示:
2 硬件電路
本設計中,減振系統的垂直加速度和加速度變化率信號經輸入電路處理后輸入DSP控制器,然后通過控制算法得到輸出量,最終控制器輸出的是脈寬調制 (PWM)信號,經功率放大后,通過調節主回路的導通時間輸出不同的電流,從而改變磁流變阻尼器的阻尼系數,實現控制作用。硬件電路主要包括信號輸入電路、TMS320LF2407控制器和PWM驅動電路。
系統就構框圖如圖2:
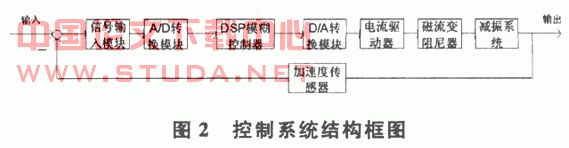
如圖所示,控制系統硬件平臺由加速度傳感器、信號輸入模塊、A/D轉換模塊、DSP控制器、電流驅動器、磁流變阻尼器以及減振平臺等部件組成。系統用加速度傳感器采集減振平臺垂直加速度,然后對采集的信息進行分析、處理,并向執行元件發出控制指令,最后產生動作。
在信號輸入電路中,模數轉換芯片根據系統采樣率、ADC有效位數等要求,選用TI公司的16位標準同步串行接口(SPI)芯片ADS8320和 MAXIM公司的MAX125。ADS8320與DSP串口連接,連接信號線DCLOCK、數據傳輸信號Dout和使能信號CS,MAX125的數據線直接和DSP相連。采用查詢模糊控制表實現模糊控制器的控制作用,通過事先的離線計算得到模糊控制器的查詢 大功率電感廠家 |大電流電感工廠
