


摘 要:針對TI公司的TMS320LF2407,在詳細(xì)描述其串行通信接口和模塊的基礎(chǔ)上,結(jié)合減搖水艙試驗臺架控制系統(tǒng),介紹了實現(xiàn)DSP與PC機(jī)串行通信的設(shè)計方法,并給出了相關(guān)的框圖和程序。
1 引言
TMS320LF2407是美國TI(Texas Instruments)公司專為數(shù)字伺服控制和嵌入式控制系統(tǒng)而推出的一種低功耗、高性能16位定點(diǎn)DSP芯片。通過把高速的數(shù)字信號處理器內(nèi)核和功能強(qiáng)大的片內(nèi)外設(shè)集成在一起, DSP成為傳統(tǒng)的微控制單元和多片設(shè)計系統(tǒng)的一種理想替代品。
在減搖水艙試驗臺架控制系統(tǒng)工作過程中,需要實時修改DSP中控制器參數(shù)等變量,因此如何實現(xiàn)PC機(jī)與DSP的可靠通信成為一個重要問題。串行通信具有連接簡單、使用靈活方便、數(shù)據(jù)傳遞可靠等大電流電感優(yōu)點(diǎn),在工業(yè)監(jiān)控、數(shù)據(jù)采集和實時控制系統(tǒng)中得到了廣泛應(yīng)用。因而,本系統(tǒng)中采用了串行通信進(jìn)行參數(shù)傳送。
本文基于減搖水艙試驗臺架控制系統(tǒng),設(shè)計了一種實現(xiàn)DSP與PC機(jī)串行通信的方案。
2 減搖水艙試驗臺架控制系統(tǒng)
減搖水艙是減小船舶橫向搖擺的重要減搖裝置之一,對減搖水艙除了進(jìn)行理論研究外,建立減搖水艙的試驗裝置是對減搖水艙進(jìn)行研究的重要手段。減搖水艙試驗臺架是研究和設(shè)計減搖水艙的重要試驗設(shè)備,它可以模擬實際艦船在海浪中的運(yùn)動,研究水艙的運(yùn)動、控制規(guī)律,并可測得其減搖效果。
為了使水艙試驗臺架能夠模擬實船在海浪中的運(yùn)動并研究電感器電壓水艙的實際作用效果,必須有一套能夠模擬海浪橫搖力矩的力矩伺服系統(tǒng)。由于海浪橫搖力矩幅值和頻率變化很快,對力矩伺服系統(tǒng)的要求較高,所以試驗臺架采用電液力矩伺服系統(tǒng)。減搖水艙試驗臺架系統(tǒng)如圖1所示。
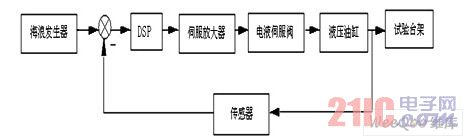
圖1 減搖水艙試驗臺架系統(tǒng)框圖
在減搖水艙試驗臺架控制系統(tǒng)中,采用PC機(jī)和DSP的主從式結(jié)構(gòu)。PC機(jī)作為上位機(jī),提供海浪橫搖力矩信號、對一些傳感器采集得到的數(shù)據(jù)進(jìn)行顯示,而DSP作為下位機(jī),完成對減搖水艙試驗臺架電液伺服系統(tǒng)的實時控制。其輸出電壓信號經(jīng)伺服放大器控制流量電液伺服閥,由伺服閥控制擺動油缸,由液壓油缸驅(qū)動試驗臺架系統(tǒng),擺動油缸輸出的海浪橫搖力矩由傳一體成型電感器感差模電感器檢測送至DSP構(gòu)成閉環(huán)控制回路。
3 TMS320LF2407及串行通信接口(SCI)
3.1 TMS320LF2407簡介
TMS320LF2407除了具有TMS320系列DSP的基本功能,還具有一些適合應(yīng)用于數(shù)字伺服控制的特點(diǎn)。采用高性能靜態(tài)CMOS技術(shù),使得供電電壓為3.3V,降低了控制器的功耗,而且高達(dá)40MIPS的執(zhí)行速度使指令周期縮短到25ns,提高了控制器的實時控制能力。TMS320LF2407片內(nèi)有高達(dá)32K 16位的Flash程序存儲器,544字的雙端口RAM(DARAM)和2K字的單口RAM(SARAM)。TMS320LF2407的片內(nèi)外設(shè)非常豐富,包括兩個事件管理器模塊、10位A/D轉(zhuǎn)換模塊、看門狗定時器、CAN現(xiàn)場總線接口、基于鎖相環(huán)(PLL)的時鐘發(fā)生器、PWM信號通道、串行外設(shè)接口(SPI)、串行通信接口(SCI)。TMS320LF2407提供的片內(nèi)外設(shè)資源使得數(shù)字伺服控制應(yīng)用中所需使用的外圍芯片大大減少了,為應(yīng)用系統(tǒng)的設(shè)計提供了方便
3.2 串行通信接口(SCI)
串行通信模塊的寄存器是8位的,并且可編程。串行通信接口(SCI)支持DSP和其他使用標(biāo)準(zhǔn)NRZ(非歸零)格式的異步外設(shè)之間的異步串行數(shù)字通信。SCI模塊會對接收到的數(shù)據(jù)進(jìn)行測試,如間斷測試、奇偶性、超時以及幀錯誤測試等,以確保數(shù)據(jù)的完整性。可編程1—8位數(shù)據(jù)長度和1—2位停止位。SCI模塊有雙緩沖的發(fā)送器和接收器,每個都有獨(dú)立的使能位和中斷位,兩者可獨(dú)立工作,也可同時在全雙工模式下工作,并且發(fā)送和接收操作均可通過中斷和查詢兩種方式來進(jìn)行。在該模塊中,通過對一個16位波特率選擇寄存器編程,可獲得超過65000種不同的波特率。
在TMS320LF2407與其他異步外設(shè)的串行通信中,對SCI模塊的控制、波特率和字符格式的選擇、操作方式和通信協(xié)議的選擇、中斷優(yōu)先級的選擇和使能等都是通過對相關(guān)寄存器編程來實現(xiàn)的。
4 本系統(tǒng)中串行通信設(shè)計方法及協(xié)議
SCI有兩種多處理器協(xié)議,即空閑線多處理器模式和地址線多處理器模式。這些協(xié)議允許在多個處理器之間進(jìn)行有效的數(shù)據(jù)傳輸。在本系統(tǒng)中,采用空閑線模式。在此模式下,當(dāng)接收到大電流電感數(shù)據(jù)塊起始信號后,串行通信接口被喚醒。處理器識別下一個串行通信接口中斷。中斷服務(wù)程序?qū)⒔邮盏降牡刂放c自己的地址進(jìn)行比較。如果該CPU正在被尋址,則中斷服務(wù)程序清除SLEEP位,并接收數(shù)據(jù)塊中剩余的數(shù)據(jù)。如果該CPU不被尋址,則SLEEP位仍保持置位。這樣就允許CPU繼續(xù)執(zhí)行它的主程序而不被SCI所中斷,直到檢測到下一個塊的起始信號。
大功率電感廠家 |大電流電感工廠
